ALOHA 2 Open-Source Guide: From Assembly to Task Training
Date Published
ALOHA 2 Open-Source Guide: From Assembly to Task Training
In the field of robotics research and development, open-source platforms with low cost, high customizability, and embodied intelligence are becoming a major trend. Jointly developed by Google DeepMind and Stanford University, ALOHA 2 is a fully open-source dual-arm robotic platform designed for teleoperation and imitation learning. Unlike the closed-source Gemini Robotics On-Device system, ALOHA 2 provides a complete open ecosystem—from hardware schematics and control software to task training—dramatically lowering the barrier to entry for robotics innovation.
Scope of Open-Source Components: Hardware + Software + Data
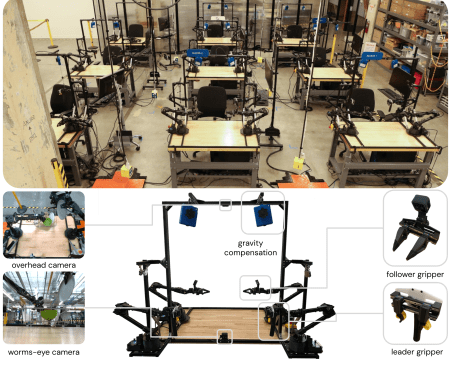
1. Hardware Design
All mechanical structure designs of ALOHA 2 are publicly available, including gripper modules, gravity compensation systems, and flexible arm mounts. Developers can fabricate or modify components using provided 3D models and BOM lists.
-
Key Components: Low-friction rails, precision bearings, high-performance servo motors
-
Cost Advantage: The total hardware cost is under $28,000 USD—only one-seventh the price of closed-source platforms like PR2.
2. Control Software and Imitation Learning Algorithms
ALOHA 2’s control code and deep imitation learning framework are fully open-source, featuring:
-
Real-time control and pose feedback
-
Deep integration with the MuJoCo physics simulator
-
Neural networks that can learn new tasks from just 50 demonstrations
The GitHub repository includes complete ROS interfaces, Python APIs, and simulation test examples to help developers get started quickly.
3. Tutorials and Dataset Support
The ALOHA project website provides step-by-step guides and data collection workflows, including:
-
Setup of remote operation controllers
-
Recording task demonstrations and generating training datasets
-
Video walkthroughs and community Q&A support
Its demonstration pipeline supports high-frequency data collection, averaging over 1,000 samples per day.
Local Deployment and Fine-Tuning Workflow
ALOHA 2’s imitation learning framework allows developers to train task models locally without relying on cloud-based large models.
Training Workflow Overview
-
Use VR controllers or joysticks to demonstrate tasks (e.g., placing objects, folding towels)
-
The system records video, motion trajectories, and environment state
-
Apply open-source neural networks for few-shot fine-tuning (typically converging within 50–100 demonstrations)
-
Test task performance in MuJoCo before deploying to the physical robot
This training paradigm has also been adopted in Gemini Robotics On-Device, although Gemini’s models remain closed-source and are accessible only via SDK authorization.
Article: Is Gemini On-Device the Android for Robots?
Cross-Platform Compatibility and Ecosystem Expansion
ALOHA 2 supports multiple mainstream component swaps and cross-platform adaptation, enabling a flexible hardware-software ecosystem.
-
Supported robotic arms: Franka, ViperX, WidowX
-
Compatible with AGV mobile bases for mobile manipulation tasks
-
Demonstrated compatibility with platforms like OpenX-Embodied and Reeman autonomous transport robots
Integration with Reeman Products
While ALOHA 2 focuses on dual-arm control and imitation learning, its modular architecture enables seamless integration with Reeman’s product line, including collaborative robot platforms and autonomous mobile bases. Through standardized API interfaces, developers can use ALOHA as a high-level manipulation module deployed on Reeman mobile systems for tasks like warehouse logistics and precision assembly.
Accessing Resources and Joining the Community
Official Website:
👉 ALOHA 2 Project Homepage
The official homepage includes hardware schematics, build instructions, data collection tutorials, and system architecture documentation.
Conclusion: Open-Source Drives Embodied Intelligence
ALOHA 2 is one of the most representative full-stack open-source robotics projects in the embodied AI space. It not only offers an affordable dual-arm platform for researchers and educators, but also opens up new opportunities for commercial deployment and local model training. Through integrations with platforms like Reeman, ALOHA is building an open, flexible, and commercially viable robotics development ecosystem.