Overcoming SLAM Navigation Challenges in Complex Warehouses: Avoiding “Looping” and “Deadlocks”
Date Published

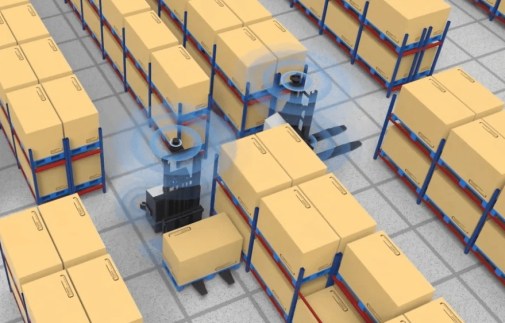
In warehouse automation, SLAM (Simultaneous Localization and Mapping) has become the backbone of autonomous navigation for AMR (Autonomous Mobile Robots). It enables robots to move freely without relying on magnetic tapes or QR codes. However, in real-world warehouses filled with racks, narrow aisles, and dynamic environments, SLAM often encounters two main issues — “looping around pillars” and “deadlock at choke points.”
This article explores the core challenges of SLAM navigation in complex warehouses and provides optimization strategies to make AMR navigation more stable, accurate, and efficient.
1. Why SLAM Struggles in Real Warehouses
While SLAM performs well in open and structured spaces, warehouses are far from ideal. Several factors can cause localization errors or route inefficiencies:
-
Repetitive structures: Similar-looking racks or long corridors can confuse SLAM algorithms, causing position drift.
-
Dynamic obstacles: Human workers, forklifts, or moving pallets can temporarily block key reference points.
-
Reflective surfaces: Metal shelves and glossy floors can interfere with laser or camera sensors.
-
Poor lighting: In low-light environments, vision-based SLAM may fail to capture accurate image features.
As a result, AMRs may start looping around pillars, hesitating at intersections, or even getting stuck in tight spaces.
2. “Looping Around Pillars” — The Localization Trap
One of the most common problems in dense storage areas is the so-called “looping” behavior. When SLAM cannot correctly identify its position due to repetitive visual or laser features, the robot may enter a self-correcting loop — repeatedly circling a pillar or rotating in place.
Causes:
-
Weak feature recognition due to repetitive surroundings
-
Laser SLAM confusion between similar geometric shapes
-
Poor loop-closure matching in visual SLAM
Optimization Strategies:
-
Feature enhancement: Add artificial visual markers or unique geometric references in monotonous zones.
-
Sensor fusion: Combine LiDAR + camera + IMU data for more robust localization.
-
Algorithm tuning: Adjust SLAM parameters for better loop-closure detection in dense environments.
3. “Deadlocks” — When AMRs Meet in Tight Corridors
Another challenge occurs when two or more AMRs enter the same narrow aisle, resulting in a “deadlock.” Without intelligent traffic coordination, both robots may stop and wait for each other indefinitely.
Causes:
-
No real-time multi-robot path negotiation
-
Lack of dynamic rerouting capability
-
Overlapping task assignments
Optimization Strategies:
-
Centralized fleet management: Enable real-time coordination between AMRs through a unified scheduling system.
-
Priority rules: Assign yield or rerouting priorities based on robot location and task urgency.
-
Predictive path planning: Use AI-based algorithms to forecast congestion and reroute accordingly.
4. Advanced SLAM Optimization Techniques
Modern AMR systems are evolving from simple navigation tools to intelligent, self-learning platforms. To overcome traditional SLAM bottlenecks, several advanced techniques are now widely adopted:
-
3D SLAM fusion: Combining 2D LiDAR and depth cameras to create a richer environmental model.
-
Dynamic obstacle learning: AI models continuously update the map as layouts or obstacles change.
-
Edge computing: Real-time data processing directly on the robot reduces latency and improves response speed.
-
Cloud map synchronization: Multi-robot fleets can share and update navigation maps collaboratively.
5. Real-World Example: Smart Warehouse Optimization
In a leading e-commerce warehouse, AMRs equipped with LiDAR + RGB-D camera SLAM achieved over 30% improvement in route efficiency after optimization. By using:
-
Unique floor markers near pillars,
-
Dynamic obstacle prediction, and
-
Fleet coordination via AI scheduler,
the system effectively eliminated looping and congestion, maintaining continuous robot flow even during peak hours.
6.Toward Truly Intelligent Navigation
As warehouse environments become denser and more dynamic, traditional SLAM algorithms must evolve. The future lies in AI-driven SLAM, multi-sensor fusion, and coordinated multi-robot scheduling.
By addressing the “looping” and “deadlock” issues head-on, manufacturers can unlock the full potential of AMRs—achieving higher throughput, lower downtime, and a smarter, safer warehouse.